반응형
한 일
1. 내장 LED 껐다 켜기
2. I2C으로 OLED 128x64 에다가 글씨 쓰기
3. GPS 읽어서 파싱하기
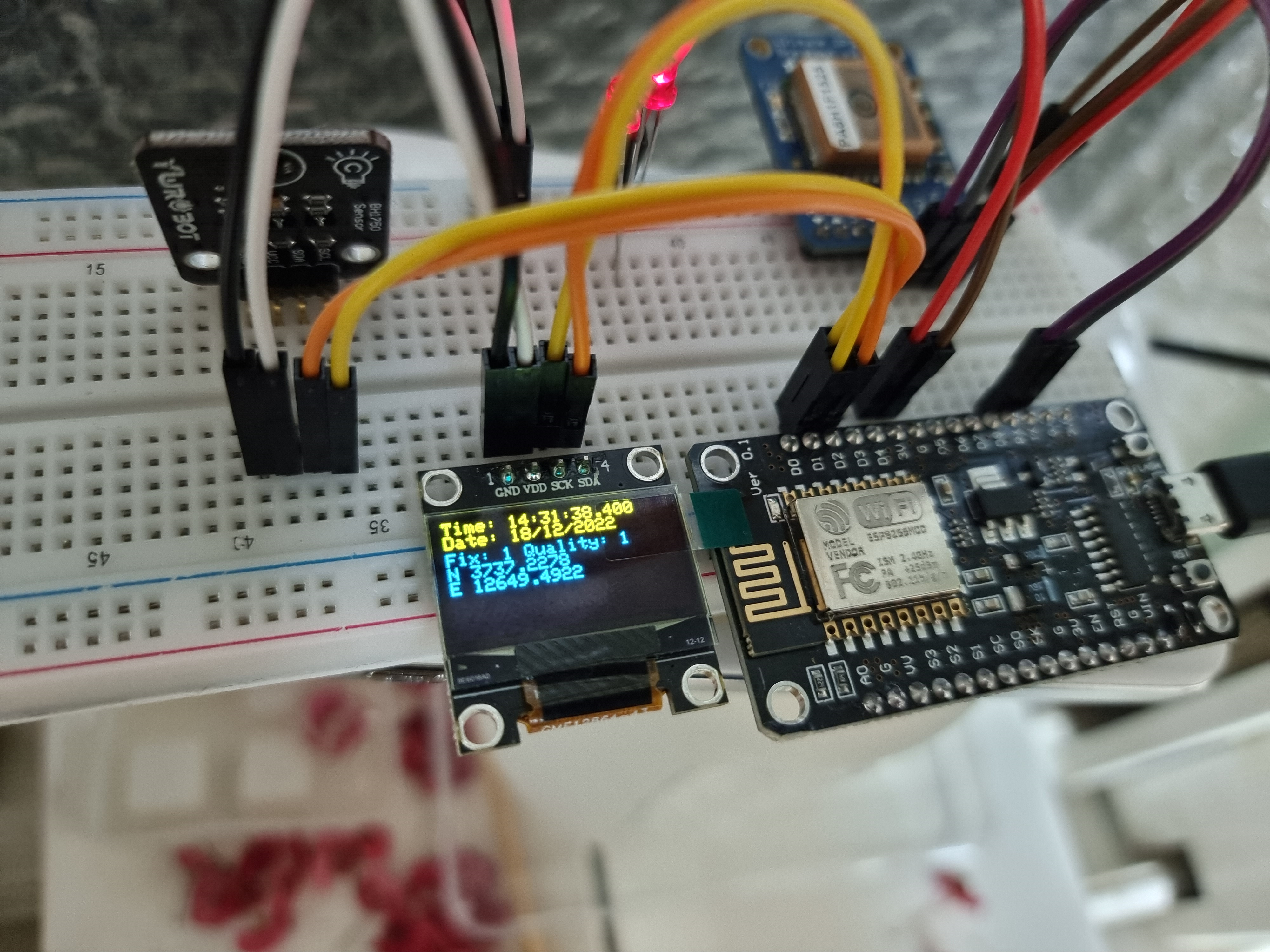
4. (통합) GPS 파싱해서 OLED에 표시하기
다음에 해볼 일
1. PWM 으로 서보 제어
2. I2C으로 조도 센서, 온습도계, IMU 값 읽어와서 표시하기
3. 아두이노 멀티 스레드 기법 찾아보고 해보기
4. 프로그램 성능 측정 기법 탐색 및 연구
5. IMU의 가속도와 자이로 센서를 이용하여 자세각 추정 필터 연구 및 개발
라이브러리가 너무 잘 되어있다...
펌웨어를 간단히 개발해보기에 참 좋은 세상이 되었다.
아래 코드는 GPS 값을 읽어서 OLED에 표시하고 UART1 TX으로 디버깅 메시지를 보내는 아두이노 코드이다.
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
|
#include <SPI.h>
#include <Wire.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#include <Adafruit_GPS.h>
// what's the name of the hardware serial port?
#define GPS_PORT Serial
#define DEBUG_PORT Serial1
// Connect to the GPS on the hardware port
Adafruit_GPS GPS(&GPS_PORT);
char connect_gps = false;
char cnt_nc_gps = 0;
const char cnt_nc_gps_max = 5;
// Set GPSECHO to 'false' to turn off echoing the GPS data to the DEBUG_PORT console
// Set to 'true' if you want to debug and listen to the raw GPS sentences
#define GPSECHO false
uint32_t disp_timer = millis();
char led_onoff = true;
/************************************/
// Display Setting
/************************************/
#define DISP_LINE_ROW 21
#define DISP_LINE_COLUMN 5
char msg[DISP_LINE_COLUMN][DISP_LINE_ROW];
#define SCREEN_WIDTH 128 // OLED display width, in pixels
#define SCREEN_HEIGHT 64 // OLED display height, in pixels
// Declaration for an SSD1306 display connected to I2C (SDA, SCL pins)
// The pins for I2C are defined by the Wire-library.
#define OLED_RESET -1 // Reset pin # (or -1 if sharing Arduino reset pin)
#define SCREEN_ADDRESS 0x3C ///< See datasheet for Address; 0x3D for 128x64, 0x3C for 128x32
Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET);
void setup()
{
/************************************/
// GPIO Settings
/************************************/
pinMode(LED_BUILTIN, OUTPUT);
digitalWrite(LED_BUILTIN, HIGH); // turn the LED on (HIGH is the voltage level)
/************************************/
// Debug Setting
/************************************/
DEBUG_PORT.begin(115200);
DEBUG_PORT.println("Adafruit GPS library basic parsing test!");
delay(500);
/************************************/
// Display Settings
/************************************/
// SSD1306_SWITCHCAPVCC = generate display voltage from 3.3V internally
if(!display.begin(SSD1306_SWITCHCAPVCC, SCREEN_ADDRESS)) {
DEBUG_PORT.println(F("SSD1306 allocation failed"));
for(;;); // Don't proceed, loop forever
}
display.clearDisplay();
display.setTextSize(1); // Normal 1:1 pixel scale
display.setTextColor(SSD1306_WHITE); // Draw white text
display.setCursor(0,0); // Start at top-left corner
display.println(F("Hello, world! TESTETSTESTET"));
display.display();
delay(500);
/************************************/
// GPS Setting
/************************************/
// 9600 NMEA is the default baud rate for Adafruit MTK GPS's- some use 4800
GPS.begin(9600);
GPS.sendCommand(PMTK_SET_BAUD_115200);
GPS.sendCommand(PMTK_SET_BAUD_115200);
delay(500);
GPS.sendCommand(PMTK_SET_BAUD_115200);
delay(500);
GPS.begin(115200);
GPS.sendCommand(PMTK_SET_NMEA_OUTPUT_RMCGGA);
//GPS.sendCommand(PMTK_SET_NMEA_OUTPUT_RMCONLY);
GPS.sendCommand(PMTK_SET_NMEA_UPDATE_5HZ); // 1 Hz update rate
delay(500);
}
void loop() // run over and over again
{
/************************************/
// Frequency Manager
// Outputs
// char disp_now : frequency indicator
/************************************/
int disp_now = false;
if (millis() - disp_timer > 1000){
disp_timer = millis();
disp_now = true;
}
/************************************/
// GPS Parser
// Outputs
// Adafruit_GPS GPS : GPS Data
// connect_gps : GPS Connection status
/************************************/
char c = false;
do{
c = GPS.read();
}while(c);
// Verifying GPS Connection
char get_new_gps = GPS.newNMEAreceived();
connect_gps = connect_gps || get_new_gps;
if ((connect_gps == false) && (disp_now == true))
DEBUG_PORT.println("GPS is NOT connected...");
// if a sentence is received, we can check the checksum, parse it...
if (get_new_gps) {
cnt_nc_gps = 0;
// DEBUG_PORT.print(GPS.lastNMEA()); // this also sets the newNMEAreceived() flag to false
if (!GPS.parse(GPS.lastNMEA())){ // this also sets the newNMEAreceived() flag to false
DEBUG_PORT.println("GPS Failed!!");
return; // we can fail to parse a sentence in which case we should just wait for another
}
}
else{ // Didn't get data now
// If you cant get 5 times, GPS status change to N/C
if(disp_now == true){
// DEBUG_PORT.println("GPS Connection is weird");
cnt_nc_gps++;
if(cnt_nc_gps > cnt_nc_gps_max){
cnt_nc_gps = cnt_nc_gps_max;
connect_gps = false;
}
}
}
// Disp GPS Data
if((connect_gps == true) && (disp_now == true)){
DEBUG_PORT.print("Time: ");
if (GPS.hour < 10) { DEBUG_PORT.print('0'); }
DEBUG_PORT.print(GPS.hour, DEC); DEBUG_PORT.print(':');
if (GPS.minute < 10) { DEBUG_PORT.print('0'); }
DEBUG_PORT.print(GPS.minute, DEC); DEBUG_PORT.print(':');
if (GPS.seconds < 10) { DEBUG_PORT.print('0'); }
DEBUG_PORT.print(GPS.seconds, DEC); DEBUG_PORT.print('.');
if (GPS.milliseconds < 10) {
DEBUG_PORT.print("00");
} else if (GPS.milliseconds > 9 && GPS.milliseconds < 100) {
DEBUG_PORT.print("0");
}
DEBUG_PORT.println(GPS.milliseconds);
sprintf(msg[0],"Time: %02d:%02d:%02d.%03d", GPS.hour, GPS.minute, GPS.seconds, GPS.milliseconds);
DEBUG_PORT.print("Date: ");
DEBUG_PORT.print(GPS.day, DEC); DEBUG_PORT.print('/');
DEBUG_PORT.print(GPS.month, DEC); DEBUG_PORT.print("/20");
DEBUG_PORT.println(GPS.year, DEC);
sprintf(msg[1],"Date: %02d/%02d/20%02d", GPS.day, GPS.month, GPS.year);
DEBUG_PORT.print("Fix: "); DEBUG_PORT.print((int)GPS.fix);
DEBUG_PORT.print(" quality: "); DEBUG_PORT.println((int)GPS.fixquality);
sprintf(msg[2], "Fix %d Qual %d Sat %d", (int)GPS.fix, (int)GPS.fixquality, (int)GPS.satellites);
if (GPS.fix) {
DEBUG_PORT.print("Location: ");
DEBUG_PORT.print(GPS.latitude, 4); DEBUG_PORT.print(GPS.lat);
sprintf(msg[3], "%c %9.4f",GPS.lat, GPS.latitude);
DEBUG_PORT.print(", ");
DEBUG_PORT.print(GPS.longitude, 4); DEBUG_PORT.println(GPS.lon);
sprintf(msg[4], "%c %10.4f",GPS.lon, GPS.longitude);
DEBUG_PORT.print("Altitude: "); DEBUG_PORT.println(GPS.altitude);
sprintf(msg[5], "Alt : %10.4f m",GPS.altitude);
// DEBUG_PORT.print("Satellites: "); DEBUG_PORT.println((int)GPS.satellites);
// DEBUG_PORT.print("Antenna status: "); DEBUG_PORT.println((int)GPS.antenna);
}
display.clearDisplay();
display.setCursor(0,0); // Start at top-left corner
for (int i = 0; i < DISP_LINE_COLUMN; i++){
if((GPS.fix == false) && (i > 2))
break;
display.println(msg[i]);
}
display.display();
}
/************************************/
// Blinker
/************************************/
if(disp_now == true){
digitalWrite(LED_BUILTIN, led_onoff); // turn the LED on (HIGH is the voltage level)
led_onoff = !led_onoff;
}
}
|
cs |
결과는 다음과 같다.
728x90
'개인공부 > 망원경' 카테고리의 다른 글
| [작성중] IMU와 지자계를 이용한 자세 방위 측정 방법에 대한 조사 (0) | 2022.12.23 |
|---|---|
| 적도의 식 망원경 자동화를 위한 조사 (2) | 2022.12.20 |
| 레이저 콜리메이터를 이용한 뉴턴식 반사망원경의 광축 정렬 (How to collimate a telescope using laser collimator?) (2) | 2022.12.10 |
| IOT Device 개발을 위한 장치 조사 - NodeMCU (0) | 2022.10.10 |
| [천체관측] 별 일주 사진 합성을 위해 Startrails 사용해보기 (0) | 2022.06.03 |