XIAKE800 기체에 기존의 항전장비를 제거한 후에 Pixhawk 4 에 PX4를 올렸다.


조종면의 동적 할당
Airframe을 만들지 않고 기체의 조종면 할당을 변경하는 방법은 다음과 같다.
Airframe은 VTOL Tiltrotor, Generic VTOL Tiltrotor으로 설정하고, (Default : 4 Rotor, 4 Contro Surface)
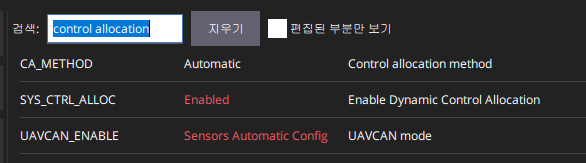
QGC에서는 SYS_CTRL_ALLOC=Enabled 으로 해야지 QGC에서 Actuators 창이 생겨서 Control Allocation 이 가능하다.
Dynamic Control Allocation이 가능하면 비행 중에도 조종면 할당을 변경할 수 있다.
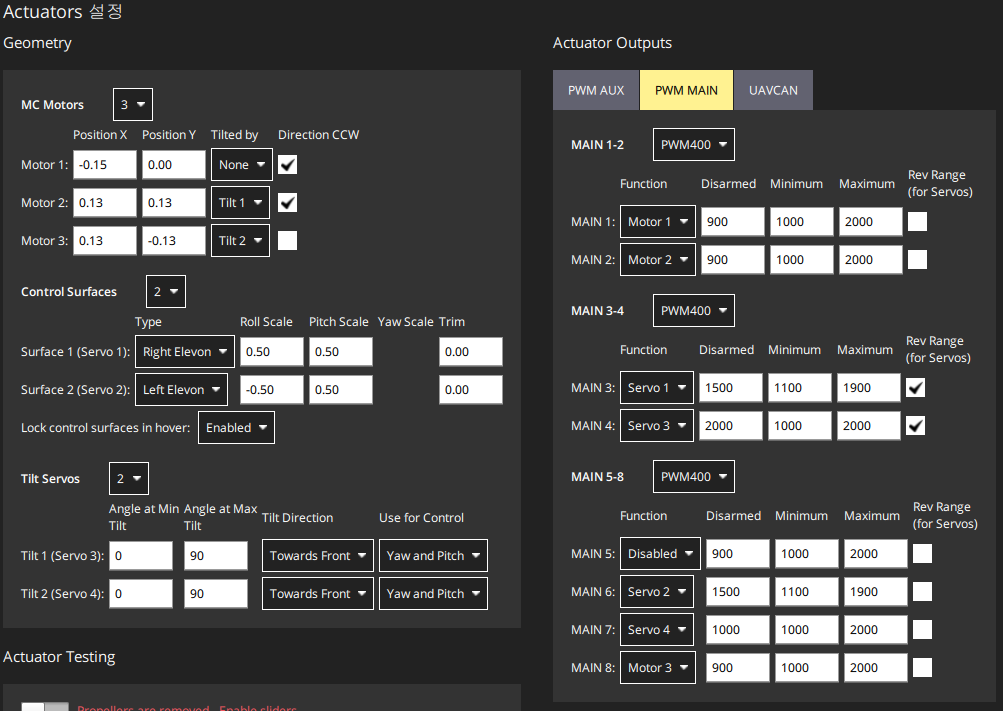
아래 표와 같이 채널에 대한 구동기 기능을 할당하고 조종기 입력에 따라서 리버스를 걸어둔다.
타면 서보는 중립 세팅을 위해 1500us으로 비시동 조건을 설정한다.
틸트 서보는 로터를 수직방향으로 놓고자 저렇게 세팅한다.
| PWM Channel | Actuator | Allocated Name | Direction | Disarm us |
| PWM1 | TR: Tail Rotor | Motor1 (M1) | CCW | |
| PWM2 | RR : Right Rotor | Motor2 (M2) | CCW | |
| PWM3 | LE : Left Elevon | Servo1 (S1) | Reversed | 1500 |
| PWM4 | LT : Left Tilting | Servo3 (T1) | Reversed | 2000 |
| PWM5 | (TT : Tail Tilting) | Disable (Servo5, T3) | ||
| PWM6 | RE : Right Elevon | Servo2 (S2) | 1500 | |
| PWM7 | RT : Right Tilting | Servo4 (T2) | 1000 | |
| PWM8 | LR : Left Rotor | Motor3 (M3) | CW |

참고로 틸트 서보의 각도는 -90 ~ 90도만 된다.
90도 이상이 되어서 요잉 제어 할 때 로터가 뒤로도 돌아가길 바랬는데..
기체의 전면 모터와 후면 모터의 KV가 다르다 (전면 1800KV, 후면 2300KV)
따라서 이러한 모터 특성을 조종면 할당에 반영하고자 다음의 매개변수를 수정한다.

로터 별 추력 계수 CA_ROTORX_CT는 다음과 같이 적용된다고 한다. $u$는 모터 입력, $c_T$는 추력 계수이다.
$$ \text{Thrust} = c_T u^2$$
참고로 18, 23은 모터 KV에 따른 값이다. 스케일은 임의의 값이며, 알아보기 쉬우라고 18, 23으로 했다. 36, 46으로 해도 된다.
이 세팅을 안하면 기체가 계속 기수를 내리려고 한다..!
Flight Mode and Switch Setting
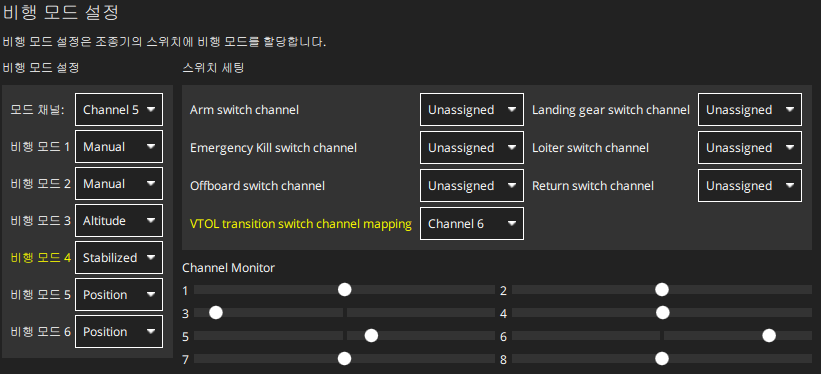
Flight Mode 와 Swtich Setting은 다음과 같다.
FS-i6 라 채널이 부족해서 비행모드와 천이스위치만 넣어두었다.
천이 스위치에 따라서 비행모드를 바꾸도록 조종기 믹서를 넣어두었다.
| FlightMode Switch \ VTOL Switch | Multi-rotor Mode | Fixed-wing Mode |
| High | Mode1 : Manual Roll, Pitch, Yawrate, Throttle |
Mode2 : Manual Aileron, Elevator, Rudder, Throttle |
| Neutral | Mode3 : Altitude Roll, Pitch, Yawrate, Altitude |
Mode4 : Stabilized Roll, PItch, Yawrate, Throttle |
| Low | Mode6 : Position VxB, VyB, Yawrate, Altitude |
Mode6 : Position Roll, Altitude Rate, Yawrate, Airspeed |
조종면 할당 검증 방법
앞서 설정한 조종면 할당에 대한 검증을 수행해야한다.
그래야지 정상적으로 작동하는 것을 확인한 후에 사고없이 비행이 가능하기 때문이다.
- 멀티로터 조종기 입력 확인 - MPC : Manual/Stabilized
- 멀티로터 제어기 복원성능 확인 - MPC : Manual/Stabilized
- 고정익 조종기 입력 확인 - FW : Manual
- 고정익 제어기 복원성능 확인 - FW : Stabilized
멀티로터 조종기 입력 확인
조종기의 입력이 잘 입력되는지 확인한다.
개인적으로 이것을 확인하는 방법은 다음과 같다.
1. 로터가 닿지 않게끔 기체를 손으로 잡는다. (왼손 추천)
2. 기체를 바닥에 붙여둔다.
3. 조종기를 Multirotor 모드로 두고 Manual 모드로 시동을 건다.
4. 조종기의 키를 치면서 반응을 확인한다.
괭장히 위험하므로 조심해서 다루도록 한다.
멀티로터 제어기 복원성능 확인
조종기 입력과 유사하지만, 기체의 자세를 기울여서 자세를 회복하는 방향으로 추력을 내는지 확인한다.
고정익 조종기 입력 확인
멀티로터 모드에서만 시동을 걸 수 있게 되어있어서 VTOL 모드로 전환하고 확인한다.
에일러론과 엘리베이터가 합쳐져있는 엘레본의 방향을 확인한다.
고정익 제어기 복원성능 확인
멀티로터 제어기 복원성능과 동일하게, 자세를 복원하려는 방향으로 조종면을 움직이는지 확인한다.
이로써 실내에서 확인해볼 수 있는 것들은 모두 확인했다.
다음은 실외비행으로 비행을 확인하도록 하자.
** EOF **
'UAV' 카테고리의 다른 글
| RC VTOL XIAKE800 5 - 실 기체 제작 비용 정리 (1) | 2023.09.28 |
|---|---|
| RC VTOL XIAKE800 3 - 실외 비행 시험 (Multi-rotor Mode) (0) | 2023.09.24 |
| RC VTOL XIAKE800 1 - 분석 (0) | 2023.09.18 |
| 나만의 작은 틸트로터 만들기 3 - 추진 시스템 선정 (0) | 2023.09.10 |
| 나만의 작은 틸트로터 만들기 2 - 로터 어셈블리 한계 하중 추정 (0) | 2023.09.10 |