반응형
앞서 정의한 요구사항으로부터 무엇을 했고 해야하는지를 정리했다.
그렇다면 어떤 UI를 통해서 사용할지를 정의할 필요가 있다.
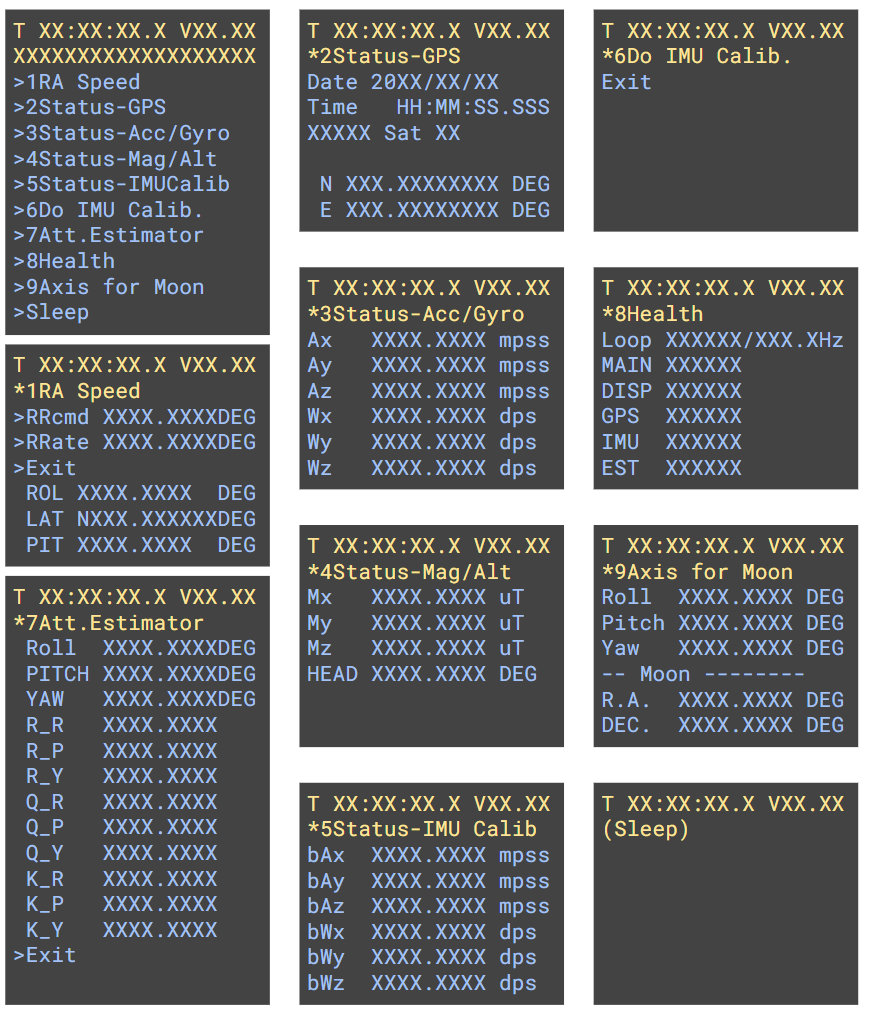
디스플레이 속성
표현할 수 있는 크기 21 개 X 8 줄 이며
최상단 두 줄은 노란색, 나머지는 파란색이다.
최상단 두 줄은 가장 중요한 정보, 항상 출력할 정보를 띄우는 것으로 하자.
나머지 여섯 줄은 필요한 정보를 출력한다.
중요 정보는 배터리 전압과 시간, 적경 회전 속도인 것 같다.
사용하는 주요 기능들을 정리하면 다음과 같다.
- 적경 회전 속도 조절
- GPS 상태
- IMU 상태 (가속도, 각속도, 지자계)
- Attitude Estimator
- Rotary Encoder (Rotation, Click)
- 스케쥴러 상태
- 달 관측용 회전 축 알려주기
메뉴를 선택하는 방법은 좌측에 꺽쇄 '>'를 0.5초 주기로 깜빡이면서 메뉴 상태를 출력한다.
여기서 클릭하면 내려간다.
UI 그려보기
대충 모사한 모습은 다음과 같다.
실질적으로 조작기능이 있는 메뉴는 1RA Speed와 Do IMU Calib 뿐이다.
코드 구현
더보기
/************************************/
// Include Headers
/************************************/
#include "oled.h"
#include "gps.h"
#include "tictok_us.h"
#include "mpu6500.h" // 6.0.3
#include "esp_12f.h"
#define min(x, y) (x) < (y) ? (x) : (y)// -> x, y중에 작은값 반환
#define max(x, y) (x) > (y) ? (x) : (y)// -> x, y중에 큰값 반환
void setRotaryRight();
void setRotaryLeft();
void setRotaryNeutral();
void updateRotary();
void updateMenuCursor();
/************************************/
// Define Devices
/************************************/
#define GPS_PORT Serial
// #define DEBUG_PORT Serial1
/************************************/
// Display Settings
/************************************/
OLED* monitor = new OLED();
GPS* gps = new GPS(&GPS_PORT);
bfs::Mpu6500* imu = new bfs::Mpu6500();
Tictok_us* perform_main = new Tictok_us();
Tictok_us* perform_rest = new Tictok_us();
Tictok_us* perform_imu = new Tictok_us();
// Simple Scheduler
float hz = 10.0f;
unsigned long last_loop_time = micros();
unsigned long now_loop_time = micros();
unsigned long size_loop_time = 1000 * (1000 / hz);
unsigned long delta_loop_time = 0;
/************************************/
// Rotary Button
/************************************/
// Rotary Encoder Inputs
#define BUTTON_KEY GPIO_D4
#define BUTTON_S1 GPIO_D6
#define BUTTON_S2 GPIO_D7
#define PWM1 GPIO_D5
#define PWM2 GPIO_D8
#define PWM3 GPIO_D3
volatile int rotary_pulse_s1 = 0;
volatile int rotary_pulse_s2 = 0;
volatile unsigned long rotary_last_pulse_s1 = 0;
volatile unsigned long rotary_last_pulse_s2 = 0;
volatile int rotary_state = 0;
volatile int rotary_state_prev = 0;
volatile int rotary_state_s1 = 0;
volatile int rotary_state_s2 = 0;
volatile int rotary_counter = 0;
volatile int rotary_counter_prev = 0;
volatile int rotary_counter_interval = 0;
volatile int rotary_right = false;
volatile int rotary_direction = 0;
volatile int rotary_left = false;
volatile int rotary_event = true;
volatile int button_counter = 0;
volatile int button_clicked = false;
volatile int did_button_clicked = false;
volatile unsigned long button_last_press = 0;
int rotation_speed_cnt_prev = 0;
float rotation_speed = 0.0f;
float rotation_speed_prev = 0.0f;
char main_menu_string[10][21]={
"%c1RA Speed",
"%c2Status - GPS",
"%c3Status - Acc/Gyro",
"%c4Status - Mag/Alt",
"%c5Status - IMUCalib",
"%c6Do IMU Calib.",
"%c7Att.Estimator",
"%c8Health",
"%c9Axis for Moon",
"%cSleep"
};
char cursor[6];
char cursor_icon = '>';
int cursor_pos = 0;
int menu_index = 0;
int menu_index_max = 0;
int menu_index_first = 0;
typedef enum Menu{
main_menu = 0,
ra_speed = 1,
status_gps = 2,
status_acc_gyro = 3,
status_mag_alt = 4,
status_imu_calib = 5,
do_imu_calib = 6,
att_est = 7,
health = 8,
moon_axis = 9,
sleep = 10,
ra_speed_select = 100,
}Menu;
void setup() {
int system_on = true;
/************************************/
// Display Initialization
/************************************/
int monitor_on = monitor->setup_display();
system_on = system_on & monitor_on;
sprintf(monitor->msg[2], "1. Display is ON");
monitor->print();
/************************************/
// IMU Setup
/************************************/
sprintf(monitor->msg[3], "2. Intialize IMU");
monitor->print();
/* I2C bus, 0x68 address */
imu->Config(&Wire, bfs::Mpu6500::I2C_ADDR_PRIM);
int imu_on = imu->Begin()
// Set the accel range to 16G by default
&& imu->ConfigAccelRange(bfs::Mpu6500::ACCEL_RANGE_4G)
// Set the gyro range to 2000DPS by default
&& imu->ConfigGyroRange(bfs::Mpu6500::GYRO_RANGE_250DPS)
// Set the DLPF to 184HZ by default
&& imu->ConfigDlpfBandwidth(bfs::Mpu6500::DLPF_BANDWIDTH_92HZ)
// Set the sample rate divider
&& imu->ConfigSrd(19);
system_on = system_on & imu_on;
if(imu_on == true) sprintf(monitor->msg[3], "2. IMU is ON");
else sprintf(monitor->msg[3], ">> IMU failed");
/************************************/
// GPS Setup
/************************************/
sprintf(monitor->msg[4], "3. Intialize GPS");
monitor->print();
int gps_on = gps->setup_gps();
system_on = system_on & gps_on;
if(gps_on == true) sprintf(monitor->msg[4], "3. GPS is ON");
else sprintf(monitor->msg[4], ">> GPS is timeout");
monitor->print();
/************************************/
// Rotary Button Setup
/************************************/
// Set encoder pins as inputs
sprintf(monitor->msg[5], "4. Intialize Buttons");
monitor->print();
pinMode(BUTTON_S1, INPUT);
pinMode(BUTTON_S2, INPUT);
pinMode(BUTTON_KEY, INPUT_PULLUP);
attachInterrupt(digitalPinToInterrupt(BUTTON_S1), isr_rotary_s1, FALLING);
attachInterrupt(digitalPinToInterrupt(BUTTON_S2), isr_rotary_s2, FALLING);
attachInterrupt(digitalPinToInterrupt(BUTTON_KEY), isr_button_click, RISING);
sprintf(monitor->msg[5], "4. Buttons are ON");
monitor->print();
/************************************/
// PWM
/************************************/
pinMode(PWM2, OUTPUT);
analogWrite(PWM2, 120);
sprintf(monitor->msg[6], "5. PWM is ON");
monitor->print();
}
void loop() {
perform_main->tic();
gps->read_all();
perform_imu->tic();
int imu_health = imu->Read();
perform_imu->toc();
float ax = imu->accel_x_mps2();
float ay = imu->accel_y_mps2();
float az = imu->accel_z_mps2();
float grav = sqrt(ax*ax + ay*ay + az*az);
float phi_acc = atan2(ay, -az) * 57.296f;
float theta_acc = asin(ax/grav) * 57.296f;
double latitude = ((double)gps->gps_device->latitude_fixed)*1E-7;
double longitude = ((double)gps->gps_device->longitude_fixed)*1E-7;
/************************************/
// Display
/************************************/
// Top Window
sprintf(monitor->msg[0], "T %2d:%2d:%2d.%1d V %5.2f",
gps->gps_device->hour, gps->gps_device->minute,
gps->gps_device->seconds, gps->gps_device->milliseconds/100, 12.60f);
// sprintf(monitor->msg[1], "Button %2d Rotary %2d",
// button_counter, rotary_counter);
// Sub Window
switch(menu_index)
{
case Menu::main_menu:
{
menu_index_max = 10;
updateMenuCursor();
menu_index_first = max(0, rotary_counter_interval - cursor_pos - 1);
sprintf(monitor->msg[1], "Main Menu");
sprintf(monitor->msg[2], main_menu_string[0 + menu_index_first], cursor[0]);
sprintf(monitor->msg[3], main_menu_string[1 + menu_index_first], cursor[1]);
sprintf(monitor->msg[4], main_menu_string[2 + menu_index_first], cursor[2]);
sprintf(monitor->msg[5], main_menu_string[3 + menu_index_first], cursor[3]);
sprintf(monitor->msg[6], main_menu_string[4 + menu_index_first], cursor[4]);
sprintf(monitor->msg[7], main_menu_string[5 + menu_index_first], cursor[5]);
if(did_button_clicked == true)
{
menu_index = menu_index_first + cursor_pos + 1;
cursor_pos = 0;
}
}
break;
case Menu::ra_speed:
{
menu_index_max = 2;
updateMenuCursor();
sprintf(monitor->msg[1], main_menu_string[menu_index-1], '*');
sprintf(monitor->msg[2], "%cRRcmd %9.4fDEG", cursor[0], rotation_speed);
sprintf(monitor->msg[3], "%cRRate %9.4fDEG", cursor[1], imu->gyro_x_radps());
sprintf(monitor->msg[4], "%cQuit" , cursor[2]);
sprintf(monitor->msg[5], " ROL %9.4f DEG", phi_acc);
sprintf(monitor->msg[6], " LAT %c%10.6fDEG", gps->gps_device->lat, latitude);
sprintf(monitor->msg[7], " PIT %9.4f DEG", theta_acc);
if(did_button_clicked == true)
{
if(cursor_pos == 0)
{
menu_index = Menu::ra_speed_select;
rotary_counter_prev = rotary_counter;
}
else if(cursor_pos == menu_index_max)
{
rotary_counter_prev = rotary_counter - menu_index + 1;
menu_index = Menu::main_menu;
}
}
}
break;
case Menu::status_gps:
{
menu_index_max = 0;
char fixqual[5];
if(gps->gps_device->fixquality == 0)
sprintf(fixqual, "NoFix");
else if (gps->gps_device->fixquality == 1)
sprintf(fixqual, "GPS");
else if (gps->gps_device->fixquality == 2)
sprintf(fixqual, "DGPS");
sprintf(monitor->msg[1], main_menu_string[menu_index-1], '*');
sprintf(monitor->msg[2], "Date: 20%02d/%02d/%02d", gps->gps_device->year, gps->gps_device->month, gps->gps_device->day);
sprintf(monitor->msg[3], "Time: %02d:%02d:%02d.%03d", gps->gps_device->hour, gps->gps_device->minute, gps->gps_device->seconds, gps->gps_device->milliseconds);
sprintf(monitor->msg[4], "%5s Sat %2d", fixqual, (int)gps->gps_device->satellites);
sprintf(monitor->msg[5], " ");
sprintf(monitor->msg[6], " %c %12.8f DEG", gps->gps_device->lat, latitude);
sprintf(monitor->msg[7], " %c %12.8f DEG", gps->gps_device->lon, longitude);
if(did_button_clicked == true)
{
rotary_counter_prev = rotary_counter - menu_index + 1;
menu_index = Menu::main_menu;
}
}
break;
case Menu::status_acc_gyro:
{
menu_index_max = 0;
sprintf(monitor->msg[1], main_menu_string[menu_index-1], '*');
sprintf(monitor->msg[2],"Ax %9.4f mpss", imu->accel_x_mps2());
sprintf(monitor->msg[3],"Ay %9.4f mpss", imu->accel_y_mps2());
sprintf(monitor->msg[4],"Az %9.4f mpss", imu->accel_z_mps2());
sprintf(monitor->msg[5],"Wx %9.4f dps", imu->gyro_x_radps());
sprintf(monitor->msg[6],"Wy %9.4f dps", imu->gyro_y_radps());
sprintf(monitor->msg[7],"Wz %9.4f dps", imu->gyro_z_radps());
if(did_button_clicked == true)
{
rotary_counter_prev = rotary_counter - menu_index + 1;
menu_index = Menu::main_menu;
}
}
break;
case Menu::status_mag_alt:
{
sprintf(monitor->msg[1], main_menu_string[menu_index-1], '*');
sprintf(monitor->msg[2], "Mx %9.4f uT");
sprintf(monitor->msg[3], "My %9.4f uT");
sprintf(monitor->msg[4], "Mz %9.4f uT");
sprintf(monitor->msg[5], "Head %9.4f DEG");
sprintf(monitor->msg[6], " ");
sprintf(monitor->msg[7], " ");
if(did_button_clicked == true)
{
rotary_counter_prev = rotary_counter - menu_index + 1;
menu_index = Menu::main_menu;
}
}
break;
case Menu::status_imu_calib:
{
sprintf(monitor->msg[1], main_menu_string[menu_index-1], '*');
sprintf(monitor->msg[2], "bAx %9.4f mpss", 0.0f);
sprintf(monitor->msg[3], "bAy %9.4f mpss", 0.0f);
sprintf(monitor->msg[4], "bAz %9.4f mpss", 0.0f);
sprintf(monitor->msg[5], "bWx %9.4f dps", 0.0f);
sprintf(monitor->msg[6], "bWy %9.4f dps", 0.0f);
sprintf(monitor->msg[7], "bWz %9.4f dps", 0.0f);
if(did_button_clicked == true)
{
rotary_counter_prev = rotary_counter - menu_index + 1;
menu_index = Menu::main_menu;
}
}
break;
case Menu::do_imu_calib:
{
sprintf(monitor->msg[1], main_menu_string[menu_index-1], '*');
sprintf(monitor->msg[2], " ");
sprintf(monitor->msg[3], " ");
sprintf(monitor->msg[4], " ");
sprintf(monitor->msg[5], " ");
sprintf(monitor->msg[6], " ");
sprintf(monitor->msg[7], " ");
if(did_button_clicked == true)
{
rotary_counter_prev = rotary_counter - menu_index;
menu_index = Menu::main_menu;
}
}
break;
case Menu::att_est:
{
sprintf(monitor->msg[1], main_menu_string[menu_index-1], '*');
sprintf(monitor->msg[2], " ");
sprintf(monitor->msg[3], " ");
sprintf(monitor->msg[4], " ");
sprintf(monitor->msg[5], " ");
sprintf(monitor->msg[6], " ");
sprintf(monitor->msg[7], " ");
if(did_button_clicked == true)
{
rotary_counter_prev = rotary_counter - menu_index;
menu_index = Menu::main_menu;
}
}
break;
case Menu::health:
{
sprintf(monitor->msg[1], main_menu_string[menu_index-1], '*');
sprintf(monitor->msg[2], "Loop %6d/%5.1fHz", perform_rest->getdt() + perform_main->getdt(), hz);
sprintf(monitor->msg[3], "MAIN %6d", perform_main->getdt());
sprintf(monitor->msg[4], "DISP %6d", monitor->perform_print.getdt());
sprintf(monitor->msg[5], "GPS %6d", gps->perform_read.getdt());
sprintf(monitor->msg[6], "IMU %6d", perform_imu->getdt());
sprintf(monitor->msg[7], "EST %6d", 0);
if(did_button_clicked == true)
{
rotary_counter_prev = rotary_counter - menu_index;
menu_index = Menu::main_menu;
}
}
break;
case Menu::moon_axis:
{
updateMenuCursor();
sprintf(monitor->msg[1], main_menu_string[menu_index-1], '*');
sprintf(monitor->msg[2], "ROLL %9.4f DEG", phi_acc);
sprintf(monitor->msg[3], "PITCH %9.4f DEG", theta_acc);
sprintf(monitor->msg[4], "YAW %9.4f DEG", 120.0012f);
sprintf(monitor->msg[5], "-- Moon --------");
sprintf(monitor->msg[6], "R.A. %9.4f DEG", 37.0013f);
sprintf(monitor->msg[7], "DEC. %9.4f DEG",-120.0014f);
if(did_button_clicked == true)
{
rotary_counter_prev = rotary_counter - menu_index;
menu_index = Menu::main_menu;
}
}
break;
case Menu::sleep:
{
sprintf(monitor->msg[1], " ");
sprintf(monitor->msg[2], " ");
sprintf(monitor->msg[3], " ");
sprintf(monitor->msg[4], " ");
sprintf(monitor->msg[5], " ");
sprintf(monitor->msg[6], " ");
sprintf(monitor->msg[7], " ");
if(did_button_clicked == true)
{
rotary_counter_prev = rotary_counter + 1;
menu_index = Menu::main_menu;
}
}
break;
case Menu::ra_speed_select:
{
rotation_speed = rotation_speed_prev + 0.1f * (rotary_counter - rotation_speed_cnt_prev);
analogWrite(PWM2, (int)(rotation_speed * 10.0f));
sprintf(monitor->msg[1], main_menu_string[1], '*');
sprintf(monitor->msg[2], "%cRRcmd %9.4fDEG", cursor_icon, rotation_speed);
sprintf(monitor->msg[3], " RRate %9.4fDEG", imu->gyro_x_radps());
sprintf(monitor->msg[4], " Exit");
sprintf(monitor->msg[5], " ROL %9.4f DEG", phi_acc);
sprintf(monitor->msg[6], " LAT %c%10.6fDEG", gps->gps_device->lat, latitude);
sprintf(monitor->msg[7], " PIT %9.4f DEG", theta_acc);
if(did_button_clicked == true)
{
menu_index = Menu::ra_speed;
}
rotary_counter_prev = rotary_counter + 1;
rotation_speed_cnt_prev = rotary_counter;
rotation_speed_prev = rotation_speed;
}
break;
default:
{
sprintf(monitor->msg[1], "ERROR");
sprintf(monitor->msg[2], " ");
sprintf(monitor->msg[3], " ");
sprintf(monitor->msg[4], " ");
sprintf(monitor->msg[5], " ");
sprintf(monitor->msg[6], " ");
sprintf(monitor->msg[7], " ");
if(did_button_clicked == true)
{
rotary_counter_prev = rotary_counter + 1;
menu_index = Menu::main_menu;
}
}
}
did_button_clicked = false;
if(cursor_icon == '>')
cursor_icon = '-';
else
cursor_icon = '>';
monitor->print();
perform_main->toc();
/************************************/
// Simple Scheduler
/************************************/
perform_rest->tic();
while(1){
now_loop_time = micros();
// Clock Overflow Case, each time after about 70 mins
if(now_loop_time < last_loop_time){
last_loop_time = 0;
break;
}
// Normal Case
else{
delta_loop_time = now_loop_time - last_loop_time;
if(delta_loop_time > size_loop_time){
last_loop_time = last_loop_time + size_loop_time;
break;
}
}
}
perform_rest->toc();
}
//3201 3201
// 0 -> 4 (2(0+1)+2) -> 10 (2*(4+1)+0) -> 23 (2*(10+1)+1)
void setRotaryRight(){
rotary_counter++;
rotary_direction = 1; // left
rotary_event = true;
}
// 3102 3102
// 0 -> 3 (2*(0+1)+1) -> 8 (2*(3+1)+0) -> 20 (2*(8+1)+2)
void setRotaryLeft(){
rotary_counter--;
rotary_direction = -1; // right
rotary_event = true;
}
void setRotaryNeutral(){
rotary_event = false;
rotary_direction = 0; // neutral
}
void updateRotary(){
rotary_state_s1 = digitalRead(BUTTON_S1);
rotary_state_s2 = digitalRead(BUTTON_S2);
rotary_state = 2 * rotary_state_s1 + rotary_state_s2;
if(rotary_state_prev == 3 && rotary_state == 2){
setRotaryRight();
}
if(rotary_state_prev == 0 && rotary_state == 1){
setRotaryRight();
}
if(rotary_state_prev == 1 && rotary_state == 0){
setRotaryLeft();
}
if(rotary_state_prev == 2 && rotary_state == 3){
setRotaryLeft();
}
rotary_state_prev = rotary_state;
}
/************************************/
// Interrupt Service Routines
/************************************/
// CW (+, R) : S1 true, S2 Rising
// CCW (-, L) : S1 Rising, S2 true
IRAM_ATTR void isr_rotary_s1(){
// prevent being clicked over twice at once
if(rotary_last_pulse_s1 - millis() < 30)
rotary_pulse_s1 = false;
else{
rotary_pulse_s1 = true;
}
rotary_last_pulse_s1 = millis();
// processing rotary action
if(rotary_pulse_s1 == true){
rotary_pulse_s1 = false;
updateRotary();
}
}
IRAM_ATTR void isr_rotary_s2(){
// prevent being clicked over twice at once
if(rotary_last_pulse_s2 - millis() < 30)
rotary_pulse_s2 = false;
else{
rotary_pulse_s2 = true;
}
rotary_last_pulse_s2 = millis();
// processing rotary action
if(rotary_pulse_s2 == true){
rotary_pulse_s2 = false;
updateRotary();
}
}
// Button Interrupt Routine
IRAM_ATTR void isr_button_click(){
// prevent being clicked over twice at once
if(button_last_press - millis() < 500)
button_clicked = false;
else
button_clicked = true;
button_last_press = millis();
// processing button action
// throw main loop the fact being clicked
if(button_clicked == true){
button_clicked = false;
did_button_clicked = true;
button_counter++;
}
}
void updateMenuCursor()
{
rotary_counter_interval = rotary_counter - rotary_counter_prev;
if(rotary_counter_interval < 0)
rotary_counter_prev = rotary_counter;
else if(rotary_counter_interval > menu_index_max - 1)
rotary_counter_prev = rotary_counter - menu_index_max;
rotary_counter_interval = rotary_counter - rotary_counter_prev;
cursor_pos = min(max(0, rotary_counter_interval), 5);
for (int i = 0; i < 6; i++)
{
if (i == cursor_pos)
cursor[i] = cursor_icon;
else
cursor[i] = ' ';
}
}
** EOF **
728x90
'개인공부 > 망원경' 카테고리의 다른 글
| SimpleGOTO 요구사항 정의 (0) | 2024.01.20 |
|---|---|
| MPU 6050/9250 등 단종으로 인한 AHRS 센서 선정.. (0) | 2023.01.01 |
| 자동 망원경을 위한 아두이노 디스플레이 메뉴 UI 설계 (0) | 2022.12.31 |
| [작성중] 지자기 센서로부터 자북/진북 방향 얻기 (0) | 2022.12.25 |
| [작성중] IMU와 지자계를 이용한 자세 방위 측정 방법에 대한 조사 (0) | 2022.12.23 |