
하드웨어 조립과 장비 바인딩을 마쳤다.
조종기 명령을 드론이 알아먹도록 설정해보자.
본 글은 목차의 굵은 글씨만을 다루며, 다른 포스팅으로 나누어 작성했다.
목차
1. Pavo20 Pro + O4 Air Unit HW 조립하기
- Pavo20 Pro + O4 Air Unit 구매하기
- Pavo20 Pro 조립하기
2. O4 Air Unit 바인딩하기
- 고글3 + fpv조종기3 바인딩 세팅
- O4 Air Unit 바인딩 세팅
3. [선택] Pavo20 Pro 에 Betafpv 펌웨어 장입하기
- CF21XX 드라이버 설치하기
- DFU 인식 오류/Zadig 으로 USB 드라이버 설치하기
4. Pavo20 Pro 기본 세팅 (1) - 통신 포트 및 수신기 설정 (본 글)
- 통신 포트 및 수신기 설정 (OSD 및 조종기 연결)
- 조종기 명령 점검하기
- 수신기 범위 세팅하기 (Neutral, Trim, Endpoint 등)
5. Pavo20 Pro 기본 세팅 (2) - 모터 점검 및 OSD 설정
- 가속도계 조정
- 모터 맵핑 및 구동 테스트 하기
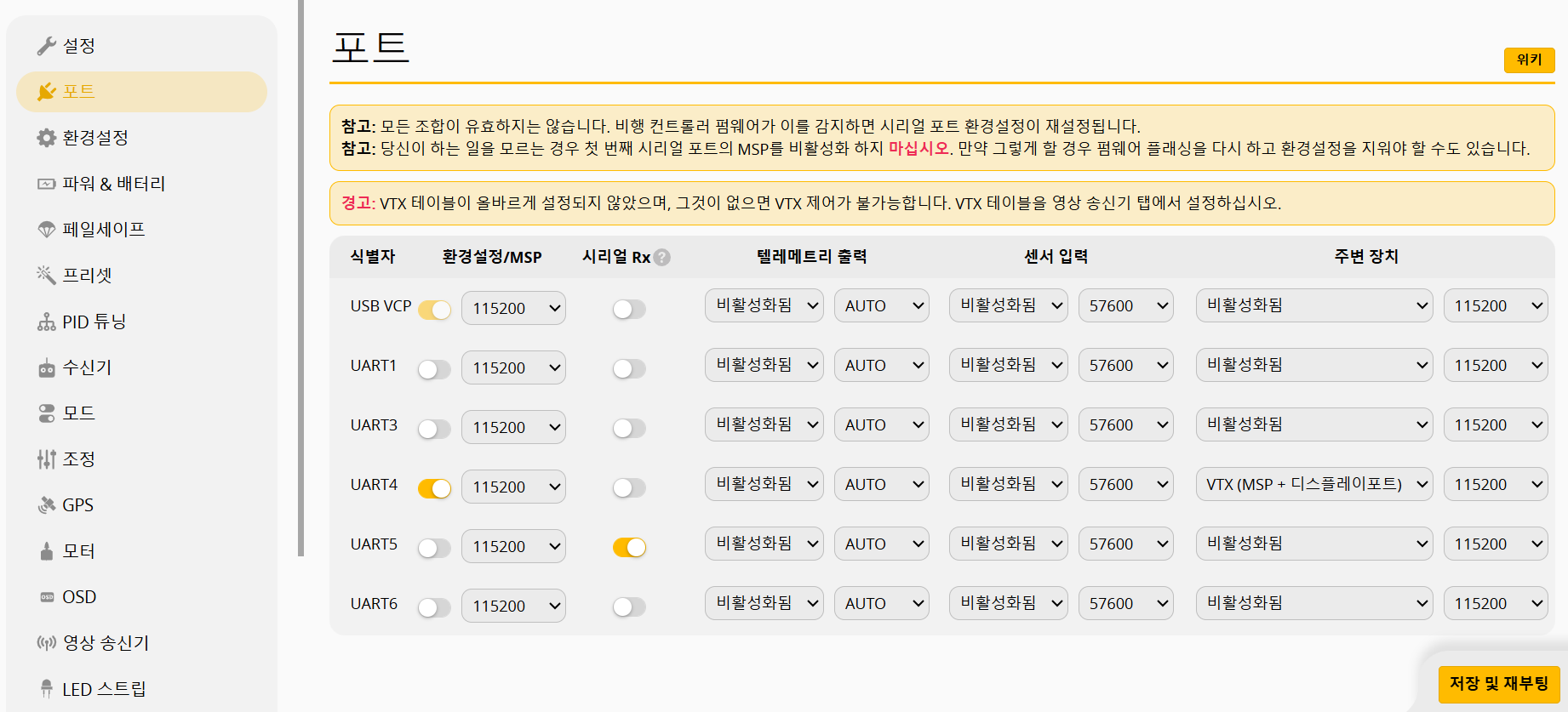
통신 포트 및 수신기 설정 (OSD 및 조종기 연결)
이 탭은 기체에 USB 만 연결해도 된다.
O4 Air unit 과 betaflight을 연동하기 위해서, 아래와 같이 설정한다.
- UART4 : 환경설정/MSP On, 주변장치 VTX(MSP+디스플레이보드)
- UART5 : Serial Rx On (조종기 연결, DJI Air Unit 은 UART5 라 한다.)
그리고 설정 저장을 위해서 재부팅한다.
재부팅 후에 수신기 모드를 아래 그림과 같이 설정하고 연결됨을 확인하자.
앞서, UART5 으로 연결되도록 설정했으므로, 수신기는 Serial (UART를 통해) 를 선택한다.
펌웨어 플래시 시, 무선 프로토콜로 SBUS 를 선택했으므로 그렇게 한 후, 저장 을 누른다.
이후에 조종기를 움직여서 미리보기의 드론이 잘 움직이는 것을 확인하자.

조종기 명령 점검하기
이 탭은 기체에 배터리을 연결하여, FC 와 O4 Air Unit 에 전원을 인가해야한다.
또한 고글3 + fpv 조종기3 도 전원을 켠 후, O4 Air Unit 과 바인딩 되어있어야한다.
다 되면 아래와 같이 롤/피치/요/쓰로틀에 대해서 움직이는 것을 볼 수 있다.
수신기 범위 세팅하기 (Neutral, Trim, Endpoint 등)
(작성중)
다음 글은 아래 링크로 넘어가자
1. Pavo20 Pro + O4 Air Unit HW 조립하기
- Pavo20 Pro + O4 Air Unit 구매하기
- Pavo20 Pro 조립하기
2. O4 Air Unit 바인딩하기
- 고글3 + fpv조종기3 바인딩 세팅
- O4 Air Unit 바인딩 세팅
3. [선택] Pavo20 Pro Betafpv 펌웨어 장입하기
- CF21XX 드라이버 설치하기
- DFU 인식 오류/Zadig 으로 USB 드라이버 설치하기
4. Pavo20 Pro 통신 포트 및 수신기 설정 (본 글)
5. Pavo20 Pro 세부 세팅하기 (다음 글)
*** EOF ***
'UAV > FPV' 카테고리의 다른 글
| [FPV] Pavo20 Pro 기본 세팅 (2) - 모터 점검 및 OSD 설정 (0) | 2026.07.04 |
|---|---|
| [FPV] Pavo20 Pro 에 Betafpv 펌웨어 장입하기 (0) | 2026.07.04 |
| [FPV] Pavo20 Pro + O4 Air Unit HW 조립하기 (0) | 2026.07.04 |
| DJI FPV 조종기3 으로 FPV simulator 해보기 (0) | 2026.05.04 |